![]()





























![]()
![]()
お知らせ Notices
Kyushu University and DENSO IT Laboratory propose new technology for smarter Indirect Time-of-Flight cameras
By considering actual I-ToF sensor characteristics, the new noise-robust coding scheme improves 3D measurement accuracy and stability for robots and vehicles, with commercial readiness. 2026.05.28Notices
Fukuoka, Japan—Researchers from Kyushu University and DENSO IT Laboratory, Inc. have developed a new method to improve the accuracy of indirect Time-of-Flight (I-ToF) cameras. The technology considers the practical limitations of real-world sensors during the design process.
A patent application was filed on May 19, and the research will be presented this June at the IEEE/CVF Conference on Computer Vision and Pattern Recognition in Colorado, the United States.
I-ToF cameras are widely used in 3D sensing systems, including smartphone facial recognition, robotic obstacle avoidance, and automotive driver-monitoring applications. Depth information enables these systems to measure distances and perform precise spatial analysis. The depth accuracy of an I-ToF camera strongly depends on the modulation functions of the laser and the demodulation functions of the sensor, specifically the coding scheme. However, most existing design methods assume perfect, noise-free sensors operating under theoretical conditions, presenting challenges for deployment on commercial devices.
Now, a research group at the Faculty of Information Science and Electrical Engineering, Kyushu University, in collaboration with DENSO IT Laboratory has proposed a new design method for coding schemes to improve depth precision in Indirect Time-of-Flight (I-ToF) cameras while considering practical sensor constraints.
The group first analyzed I-ToF errors using a practical noise model, then derived a new evaluation metric based on the variance of depth estimates. From there, they designed coding schemes that respect the physical limits of real sensors, including peak light-source power, bandwidth limits, binary waveforms, and the exclusive multi-tap mechanism used in practical sensors.
The method produces two tailored coding schemes: one optimized for high signal-to-noise ratio (SNR) environments, where the useful signal is strong, and one for low-SNR conditions, where noise is harder to suppress. In computer simulations, both outperformed conventional methods on Mean Absolute Error (MAE), a standard measure of average measurement accuracy.
The team then validated their approach using a 240 x 240, three-tap I-ToF camera to measure flat boards, spheres, and moving objects. The proposed schemes were confirmed to realize more stable depth estimation than conventional methods in both high-SNR and low-SNR environments. Notably, when capturing moving objects, the proposed method with a 5-millisecond exposure achieved lower error and Root Mean Square Error (RMSE) than the conventional method at a 15-millisecond exposure, demonstrating its effectiveness not only for noise reduction but also for achieving higher frame rates.
“Because the proposed method can suppress noise and motion blur even in low-SNR environments and during the capture of moving objects, it can be applied not only to autonomous robots and automotive systems, but also to airborne drones and human motion measurement in factories, hospitals, and homes,” says Professor Hiroshi Kawasaki from Kyushu University’s Faculty of Information Science and Electrical Engineering.
“Autonomous robots and vehicle systems require stable sensing under diverse conditions, including target motion, distance, required measurement accuracy, and illumination. The proposed indirect time-of-flight sensor reduces noise and motion blur while enabling higher FPS, thereby expanding the application range of I-ToF cameras. Through continued collaboration with Kyushu University, this technology is expected to lead to new applications in autonomous systems,” says Ryusuke Sagawa, Principal Researcher, Research & Development Group, DENSO IT Laboratory, Inc.
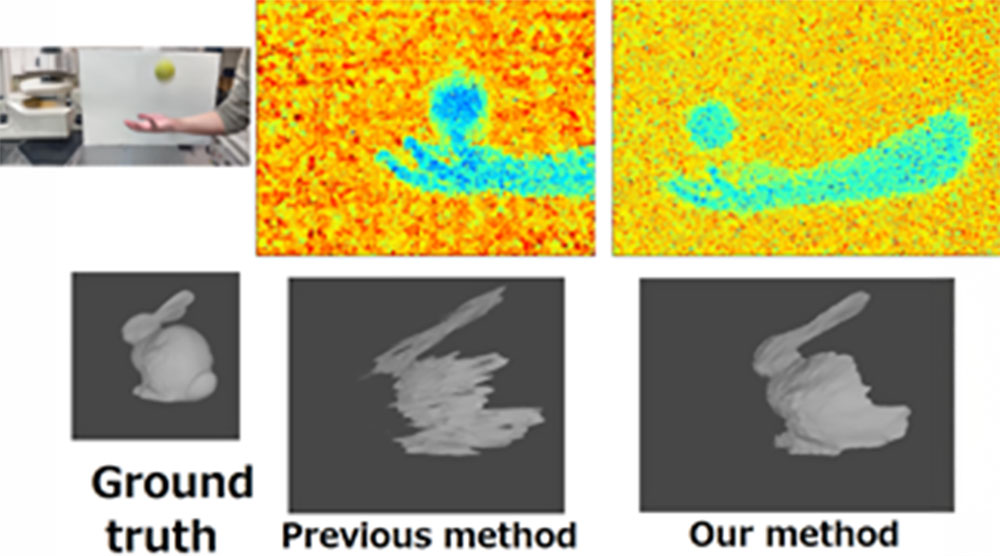
Upper Row: Measurement of a scene where a ball is being thrown. While the ball's outline is blurred in the conventional method, it remains sharp in the proposed method.
Lower Row: Simulation results. When ambient noise is added under the same conditions, the proposed method shows significantly less impact.
###
Reference information:
‐Kyushu University press release: full release
‐Related press release: https://d-itlab.co.jp/release/20260527_cvpr2026-accepted-papers/
About DENSO IT Laboratory, Inc.
DENSO IT Laboratory, Inc. is a wholly owned subsidiary of DENSO Corporation. Based in Tokyo, it is an advanced basic research company specializing in software and information technologies. Its seed-driven research covers areas such as deep learning, computer vision, natural language processing, cognitive science, signal processing, user interfaces, and sensing technologies.
https://www.d-itlab.co.jp/
Contact
Professor Hiroshi Kawasaki
Faculty of Information Science and Electrical
TEL: +81-92-802-3777
Mail: info★cvg.ait.kyushu-u.ac.jp
Please replace ★ with @