
































|
|
倉爪亮
教授
システム情報科学研究院
専門分野
ロボット工学
|


ロボットがいる未来について、私たちは長い間、ロボットが人間に代わって危険、汚い、キツい仕事を担う姿を想像してきました。そうした映画のスクリーンに登場するような万能なロボットのイメージの一方で、今後、工場や家庭で働く近未来の知的ロボットの姿は、私たちが思い描くものとは異なったものになるかもしれません。
「全てのロボットに高価なセンサーやプロセッサーを搭載し、スーパーロボットとして開発するには技術的課題が多く、また製造コストも膨大なものになります」と、九州大学大学院システム情報科学研究院の倉爪亮教授は指摘します。
「それよりも、ロボットの周囲環境にセンサーを配置し、センサーが収集した情報を必要に応じてロボットに送信する方法はどうでしょうか。周囲の環境もろともシステムに組み込むことで、単純なロボットでもスーパーロボット並みに知的に振る舞うことが可能です」。
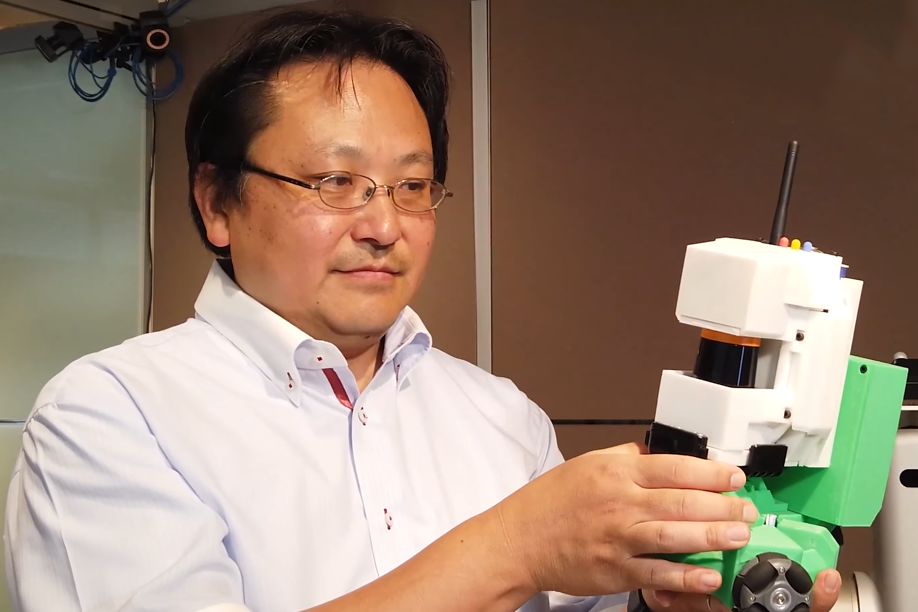
研究グループが使用するロボットの一つを手にする倉爪教授
倉爪教授のグループは、最先端の技術を応用した知的サービスロボットの実現を推し進めています。こうしたロボットは、日常生活の支援、見守りや警備、案内作業、さらには患者へより質の高いケアを行う訓練での活用など、日常生活のあらゆる局面で人間をサポートすることが期待されます。
サービスロボットの実現を目指して倉爪教授が掲げるのが、周囲のセンサーが情報を収集、整理し、必要に応じてその情報をロボットとリアルタイムに共有する「環境情報構造化」という考え方です。タスク分散と、センサー配置の最適化により、コストの効率化と個々のサービスロボットのより良い協働を実現します。
倉爪教授のチームは、膨大な情報の収集と処理を統合する 「タウンマネジメントシステム」を開発しました。一般公開されているこのシステムは15年以上にわたり進化を遂げてきました。
センサーは移動させることもできます。倉爪教授のチームは、電動車椅子ナビゲーションの最新の実証実験で、周囲を探索、ロボットや人の位置を特定する移動式センサーを用いました。
複数のモバイルセンサーが周囲を探索し、その情報を車椅子に伝えてナビゲーションする様子を紹介する映像
「ロボットが周囲の状況をより正確に把握し、断片的な情報の中でも正しい判断を下せるよう、実現に向けて一歩一歩取り組んでいます」と倉爪教授は語ります。「人間同士のコミュニケーションと同様に、会話やジェスチャーでロボットとの意思疎通を図れるようになるのが最終的な目標です」。
目標の達成に向け、倉爪教授のチームはこれまで培ってきたソフトウェアとハードウェアをベースに、常に新しい技術を模索し、取り入れています。
例えば、倉爪研究室では、全国に先駆けて伊都キャンパスに設置された5Gの高速携帯電話ネットワークを使った実証実験を行ったり、案内ロボットの開発には日本の準天頂衛星システムによるセンチメートル単位の測位情報を活用したりしています。
倉爪教授のグループが開発する、拡張現実(AR)を用いたユマニチュードという介護手法を教えるツール
倉爪教授は、生身の人間の手が求められるような仕事においてもロボットが活躍する道を探っています。研究グループは、 認知症患者とその介護者の双方に好ましい相互作用をもたらす優しい介護手法「ユマニチュード」の担い手の育成のため、拡張現実(AR)の技術を利用した訓練システムを開発しています。
このシステムは、等身大の人形に搭載された触覚センサーと、人形に患者の顔を重ねて表示できるスマートグラスを活用し、またリアルタイムなフィードバックによって介護者のユマニチュードの技術の習得をより効率的に、充実したものにしてくれます。
ロボットの普及に伴い、その開発の役割が企業に移っても、大学がロボット開発の分野において特別な存在であることは変わらないと倉爪教授は考えています。
「さまざまな分野の最先端技術を組み合わせ、一歩先の未来を社会に提示することが大学の役割です」と倉爪教授は強調します。「開発の最前線にいるからこそ、明日の新しいビジョンを描くことができるのです」。